

测绘无人机采用RTK差分定位系统(可实现厘米级定位),这样也是为了加快作业效率。据介绍如果采用普通GPS定位,为了校正误差还需要派人去实地布设若干个像控点,而用了RTK则可以基本不用、或是只需要少量像控点。
这篇文章告诉你测绘无人机上RTK到底有什么用?
第一:我们得明白什么是RTK?
RTK(Real -time kinemaTIc)定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
第二:RTK是干什么用的?
RTK(Real -TIme kinemaTIc)定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
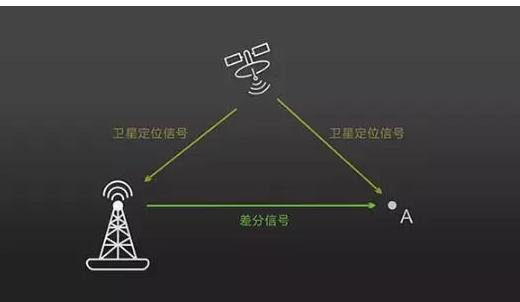
如上图所示,基站与A点的距离比较近,因此他们接收卫星信号时受到的大气层影响也基本接近,基站本身已知所处位置的坐标,在得到卫星信号提供的坐标之后与原数据做新差分,并将差分的结果告知A点,因此A点也可以得到高精度的结果。
第三:RTK对于无人机来说有什么用?
自从RTK带入无人机领域以后,最近一段时间RTK技术在无人机上的应用有点火。在农业植保领域,大家都已经知道它能为无人机提高定位精度,降低飞行误差。
由于卫星信号的多路径效应以及大气中对卫星信号的折射和反射,当农田周边出现防风林或者天气环境影响时,卫星的定位精度就会降低,导致作业中的无人机出现航线偏移。
航线偏移存在一定的风险,在便用普通GPS进行定位,航线偏移的误差甚至可能达到10米左右,如果偏移量太大,将可能导致植保无人机撞上防风林或者其他事故发生。因此这样的自主飞行并不能让人安心,也没有办法真正的解放操作员的双手,操作员仍需要全神贯注地盯着整个作业过程,随时准备救场。
通过下图我们先来了解一下GPS和RTK定位的其中一个特点:

普通GPS的圆概率误差(CEP)有50%左右的概率在2.5米以内,另外50%的误差可能更大,甚至接近10米。上图中,当我们想要寻找O点的位置时,普通的GPS会告诉我们O点在A处,而A则是黄圈直径10米范围内的任意一个点。RTK通过实时差分技术,可以将范围缩小到10cm内。
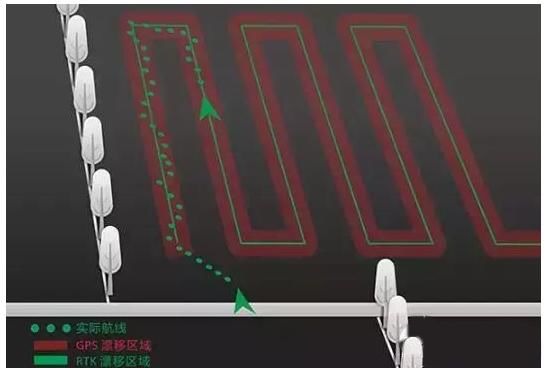
飞机在作业时获取到的航线坐标并不是一条直线,而是一个有宽度的区域,如果使用GPS定位进行航线作业,则区域的宽度在0-10米的范围内,此时飞机实际飞行的轨迹将会是一条歪歪扭扭的曲线,并且每一次飞行的曲线都不一致。
而使用RTK技术时,航线将是一个0-10厘米宽度的区域,与GPS相比,RTK基本等于是直线飞行,弯曲的幅度很小,因此效果将更均匀可控。
植保无人机:在一些垄间距较大的田间作业时,如发生的偏移较大,甚至可能产生作物本身大部分漏喷和土地污染等次生危害,总而言之,RTK通过大幅提高定位精度来拓宽GPS定位技术的应用场景。在未来的农田里,RTK也会有更多产生作用的地方。它将融入作物生长的每一个阶段,帮助我们实时获取农田中任意位置的时间和空间信息,再搭配对应的设备,实现定时、定点、定量的农药化肥投放,取得最佳的经济效益和环境效益。除了植保作业外,高精度的实时定位还可以协助农村土地测量、确权和提供其他农田中的无人自动化设备高精度导航与数据服务。
第四:在植保无人机上使用RTK技术存在哪些问题?
1、基站的设置及作业半径对RTK 的测量精度和作业速度有直接影响。基准站应尽量架设在地势较高的地方,而且要远离强电磁干扰源和大面积的信号反射物。
2、RTK技术的本身,是依赖于GPS卫星定位的,它的使用要有四颗以上卫星相位观测值的跟踪和必要的几何图形,如果所在地本身接受GPS的信号就很差,那RTK也没有什么作用。另外在有大面积的信号反射物的地方是无法定位的,如高层建筑附近,茂密的森林等;强电磁源也会干扰信号,如高压输电线附近,变电站等,在云层较厚的时候也有影响。
本文链接:https://ue4gis.com/blog/624.html
本文标签:无人机
上一篇:无人机飞控技术详细解读
下一篇:航空摄影的质量控制











