

三维模型是物体的多边形表示,通常用计算机或者其它视频设备进行显示。显示的物体可以是现实世界的实体,也可以是虚构的物体。

三维模型已经应用于各种不同的领域。医疗行业使用它们制作器官的精确模型;电影行业将它们用于展现活动的人物、物体以及现实电影;建筑业将它们用来展示提议的建筑物或者风景表现;在最近几十年,地球科学领域开始构建三维地质模型。
倾斜摄影测量技术作为一个新兴的技术方法,在三维建模和工程测量中有广泛的应用前景。
Wish3D·Earth是图新地球技术团队基于 WebGL技术自主研发的国产实景三维模型Web端发布展示平台,支持发布大规模(TB级)各类二三维数据,包括卫星影像、地形、倾斜模型、人工模型、BIM模型等,完美实现了实景三维模型和人工模型同场景展示效果,数据发布后支持一键分享到网页端、手机端进行成果汇报展示,在线体验www.tuxingis.com
1 什么是倾斜摄影?
近年来,构建智慧城市正在如火如荼地展开,城市三维数字模型在其中扮演着十分关键的角色。要绘制高效、智能的城市图景,就需要对城市空间三维数据进行表达与处理,也就需要建立城市的三维景观模型。在这个过程中,除了备受关注的人工建模,还有一项新的建模技术正在兴起并发挥着越来越重要的作用。
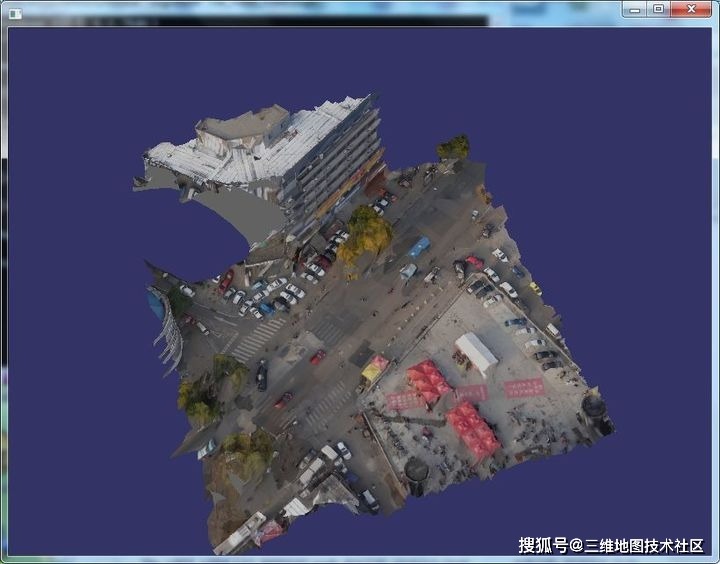
图1 倾斜摄影瓦片数据
初见图1所示模型,你一定想知道这个三维模型是怎么构建的。棱角参差,没有完整的建筑,看着不太符合人工建模(如3Ds MAX建模软件)的结果。其实图中所示的三维模型就是倾斜摄影相机飞过城市上空再经过软件的预处理所获取的一个瓦片数据(像图2中一块一块拼起来的,形象称为瓦片数据)。
当我们将这样大量的瓦片数据拼接起来后,就形成了一个城市三维景观模型。这个神奇的新兴建模技术就是我们所要介绍的倾斜摄影技术:倾斜摄影数据获取设备+后处理软件全自动化生成城市三维景观模型。

图2 瓦片数据组成整体模型示例
倾斜摄影以一个航空飞行器携带一组倾斜摄影设备(一个垂直正射镜头和若干个倾斜镜头)飞行过城市上空便可实现自动化迅速建模,真实还原城市三维场景。这个近十几年来才发展起来的“后起之秀”,颠覆了传统城市建模。它的发展主要集中在两点:数据获取设备(即倾斜相机)和后处理软件。
目前国内已经有很多倾斜摄影系统,如北京红鹏天绘公司的微型无人机倾斜摄影系统,广州中海达公司的iScan系列等。也有越来越多的人开始投入到倾斜摄影技术的研究上来。倾斜摄影技术最大的特点是快,这正契合现在很多城市现代化进程对建模的基本要求,例如武汉市的城市口号——“武汉,每天不一样”。
传统的基于人工或半人工的城市三维建模显然满足不了这种快城市化发展需求,因此倾斜摄影应运而生。倾斜摄影技术显著提高了建模速度,自动化建模解放了人力。而在模型精度上,倾斜摄影技术也在不断突破创新,某些应用层面上已经不亚于人工建模。
总的来说,倾斜摄影技术的特点可以归纳为:
(1)真实性。无人机观测数据直接用于模型构建,包括地物的外观、位置、高度属性都与真实场景一致。
(2)高效性。借助无人机或其他各种飞行设备,整个城市的数据可在一天内采集,后续软件预处理都是全自动化实现。
(3)较高的性价比。除了在人力、财力和时间方面有很强的优势,它本身属于航空摄影测量的一种,所得数据是带有空间位置信息的可测量影像数据,能输出多种成果,应用于其他多种领域。
2 倾斜摄影两大关键技术
前面已经提到,倾斜摄影技术有两大主要发展:数据获取设备与后处理软件。数据获取设备也就是倾斜摄影相机,传统的摄影测量只是像拍证件照一样从正上方垂直拍摄正投影像,而倾斜摄影设备是由一个飞行平台搭载多个传感器,同时从正射和多个倾斜角度进行多角度全方位的影像采集。
具有代表性的设备有德国IGI公司的Penta-DigiCam系统、徕卡公司旗下的RCD30和ADS40三线阵数码相机、微软公司旗下UCO等,这些也是行业内最早的倾斜摄影数据获取设备。目前最常见的是1+4传感器设备,即一个垂直传感器+四个倾斜传感器。随着技术的发展,出现了搭载更多倾斜镜头的倾斜摄影设备,图3展示了1+8传感器的倾斜摄影设备。
后处理软件,是指对倾斜摄影设备拍摄的航空影像进行解算和预处理获取城市三维数据模型(多个角度观察地物,记录了地物的三维空间位置信息)。具有代表性的有美国Pictometry公司的Pictometry系统、法国Acute3D公司的Smart3DCapture和微软Vexcel公司的Ultramap软件等。数据获取设备和后处理软件共同推动了倾斜摄影技术的发展。

图3 多倾斜镜头的倾斜摄影相机
3 倾斜摄影建模原理
在学习倾斜摄影建模原理之前,我们需要先了解地形地貌模型的构建原理。
地形地貌建模是较早实现的自动化建模,基于数字高程模型(Digital Elevation Model, DEM)数据,在ArcGIS或3Ds MAX等软件中即可实现三维模型的构建。在地貌模型的构建过程中,为了达到逼真效果,最常见的方法就是DEM与数字正射影像(可以理解为纹理图像)叠加形成地表景观。在这个过程中,高程三维建模主要包括两种方式:基于不规则三角网(TIN, Triangulated Irregular Network)的三维表面建模和基于规则格网的三维表面建模。
其中,不规则三角网通过不规则分布的离散数据点生成连续的三角面来逼近地形表面(图4)。用于生成不规则三角网的三角形中,狄洛尼(Delaunay)三角形在地形拟合方面运用的较普遍,因此常被用于不规则三角网的生成。它的构成原则是三角形的外接圆内部不包括其他点。当地形中包含有大量的特征线如断裂线、构造线时,TIN模型能更精确合理表达地表形态。

图4 不规则三角网构造的地形表面
规则格网,由原始的DEM数据(栅格影像,像元值存储高程值)直接生成地形。规则格网在X和Y方向上具有不可变的分辨率。当地形起伏较大时,规则格网的表达效果则不如不规则三角网。
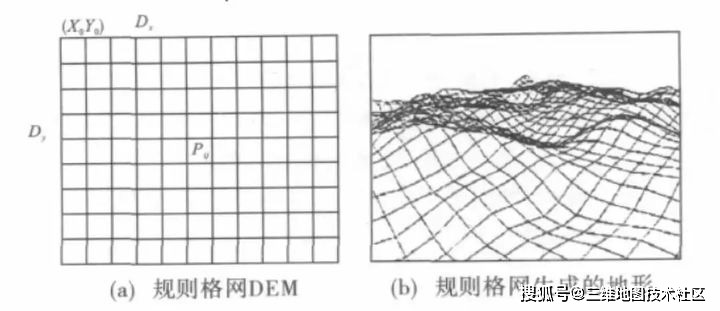
图5 DEM与DEM生成的地形
传统的城市建模中,多是以半自动化半人工的建模方式进行。首先以DEM数据为基础,自动化构建地形地貌模型,叠加数字正射影像,形成粗糙的城市三维模型。之后,经过3Ds MAX、Sketch Up等建模软件进行房屋、植被的精细建模。
这种建模方式下,并非要事无巨细,一概都逼真表达,而是根据不同的需要和有限的时间、经济、技术等条件进行各种取舍与简化。即便如此,获取较高精度的城市三维模型仍需要花费大量的人力、财力与时间。并且随着城市化建设进程的加快,这种仅依靠人力的建模方法,无法短周期内更新,存在着很多弊端。
相比之下,倾斜摄影技术进一步将这种“自动化”推向了后续的房屋、植被等的精细建模。也就是说,整个城市景观都采用自动化的方式。从中,倾斜摄影技术可以获得三种表现形式的数据:实体模型文件、TIN三角网数据和点云数据。
其中,点云数据是倾斜摄影获取的最基础的数据,点簇在空间中的分布代表了具有变化特征的位置,一般变化越剧烈的位置,点云越密集。点云数据的获取,正是利用了多角度拍摄地物所蕴含的三维空间信息,是航空影像最直接的解算结果。那么,倾斜摄影究竟是什么样的形式呢?如图所示,在倾斜摄影航空拍摄中,五个镜头所拍摄影像需要有一部分重叠,一般采取30%旁向重叠度和66%航向重叠度。三维点的坐标通过多视影像联合平差和多视影像密集匹配等方法解算得到。
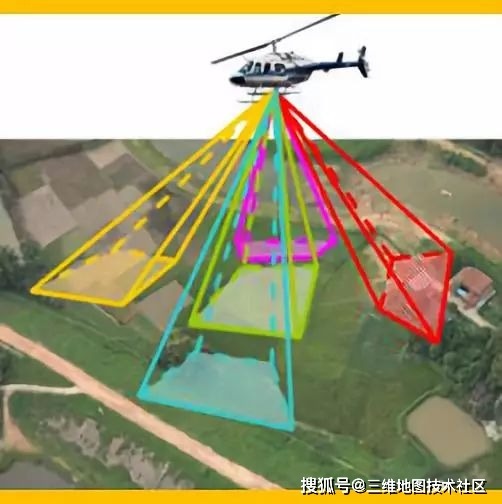
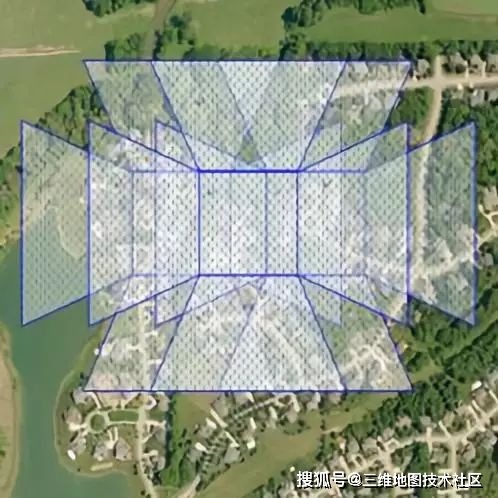
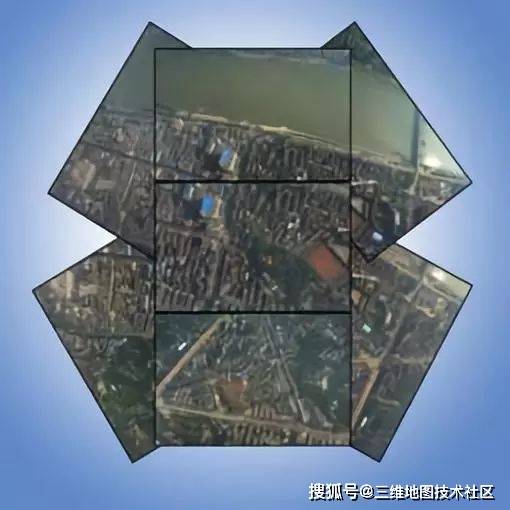
图6 倾斜摄影航拍效果图
获取点云数据之后,类似于地形地貌建模,通过点云可以构建出TIN,在TIN的基础上通过三角面片的组合可生成白模,然后通过纹理图片投影映射,就可以得到我们看到的实体模型文件了。

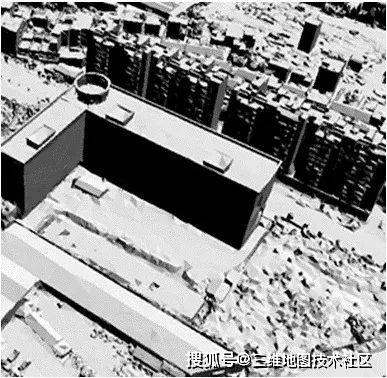

图7 由点云到真实三维模型的构建过程
4 倾斜摄影数据应用的难题
那么,倾斜摄影技术如此快速的建模方法为什么没有普及应用呢?虽然相对于人工建模,倾斜摄影技术无论在建模速度,还是在建模精度上都已经取得了很大优势。但在模型后续的应用上,倾斜摄影模型还存在一个很大的弊端:它的建模原理决定了所建三维模型的整体性。
倾斜摄影三维模型是由影像解算出点云、迅速构建三角网、之后贴上纹理生成,构建的是一个连续的不规则三角网。因此,整个模型是一个整体,虽然人眼可以迅速通过纹理辨别楼栋、树木、车辆等物体,但对于计算机来说,把物体分开确是一件很难的事儿。
传统的人工建模,通过对每个或每类物体进行独立的建模,之后叠加到一起形成三维场景,从建模开始就是“物体独立”的,不存在连在一起的现象。而倾斜摄影技术获取的三维模型数据在初期只能用于简单的场景漫游,无法分离出物体对象,因此自然也不能记录每个物体的属性信息,无法进行单独管理。
在智慧城市的应用中,大数据、多属性是一个关键技术,三维立体城市不仅是视觉上的立体化,更应该是数据的载体,让每个物体都可以“活起来”。因此,在对倾斜数据进行应用之前,“单体化”成了必不可少的预处理过程。
“单体化”的目标旨在让倾斜摄影数据的每个物体分离开来,能够在整个模型中进行单独选中、赋予属性、查询属性等基础GIS操作。“单体化”研究也吸引了很多学者的关注。
从目前来看,单体化主要有三种方法:
第一种是利用三角面片中每个顶点的额外存储空间,把建筑物(或其他物体)的ID存储起来,一个建筑物对应的三角形存储的是共同ID值。
第二种是在三维渲染时,动态地把对应的矢量面叠加到倾斜摄影模型上,达到单体效果。
第三种对三角形进行切割,把连续的三角网从物理上切割开来。
三种单体化中,切割单体化实现了真正意义上的分离,也成为了很多学者的研究重点。目前,基于点集的切割方法运用已比较成熟(图8),但同时也存在一个很大的问题:切割后的模型具有明显的“锯齿”,未达到良好的视觉效果,而基于三角形的切割技术有效的解决了这一问题(图9)。
不过,这种切割单体化的方法,目前还处在人工切割的阶段,也就是说,切割线还仅仅是人工绘制的。可喜的是,随着图像识别与机器学习的发展热潮,基于图像识别算法对倾斜摄影数据纹理的识别与特征线的识别能够推动切割单体化的自动实现,从而真正实现倾斜摄影数据的应用普及。
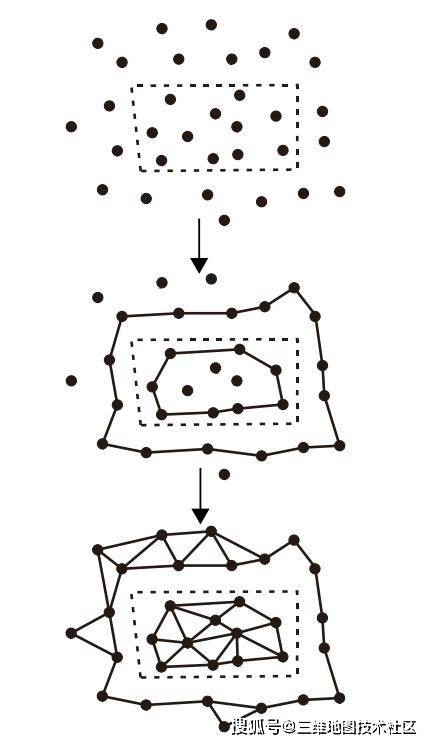
图8 基于点集的切割单体化
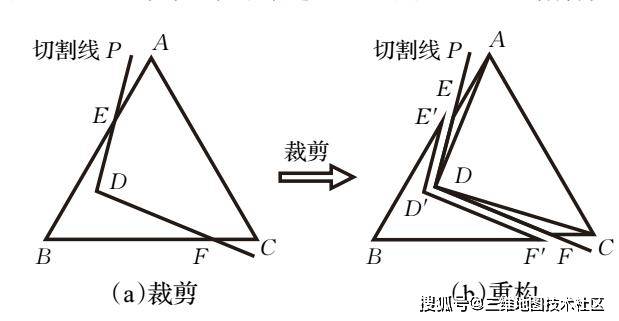
图9 基于三角形的切割单体化
当我们抬头看天,无意中看到无人机时,也许它就正在执行着倾斜摄影的任务。当倾斜摄影逐渐普及,有意中我们将发现,智慧城市的发展更加迅速,城市视界变得更加绚丽多彩且炫酷非凡。
本文链接:https://ue4gis.com/industry/639.html
本文标签:实景三维
上一篇:数字孪生开启绿色制造新模式
下一篇:贵州测绘地理信息支撑服务乡村振兴











